 |
||||
|
||||

Technologies on Display
B1 - Interactive Internet Robots
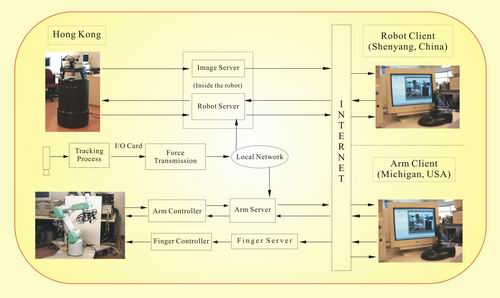
This project presents a system that enables multiple operators to interactively control remote robots or mechatronic systems with real-time haptic feedback via the Internet. A novel approach called distributed event-based method has been developed to overcome the instability problem caused by time delays of the Internet communications and to synchronize human actions and robot motion. In the system, based on the super-media technology the human operators can feel in real-time interactions between the robots and the environment or interactions with other operators. An Internet-based cooperative robots system has been built among universities/institutions in Hong Kong, China, USA, and Japan.
Applications
- Internet-based manufacturing (e-manufacturing)
- Remote service and inspection in hospitals, factories, etc.
- Interactive Internet-based games
Features
- First multi-site, multi-operators, and multi-robots system based on the Internet
- Feedback of super-media information, i.e. multi-media information (vision, audio) plus haptic feedback (force, etc)
- Task synchronization based on a novel distributed event-based method
- Superior performance and stability regardless of time delay of the Internet communications
- Applicable to remote control via commercial mobile communication networks
Principal Investigator
Prof. Y. H. Liu
Department of Automation and Computer-Aided Engineering